1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
| clear
syms theta_s theta_v theta_f t1 t2
theta_s=60;
theta_v=120;
theta_f=30;
t1=1;
t2=1;
theta0=theta_s;
theta_g=theta_f;
t_f=t1;
a10=theta0;
a11=0;
a12=(12*theta_v-3*theta_g-9*theta0)/(4*t_f^2);
a13=(-8*theta_v+3*theta_g+5*theta0)/(4*t_f^3);
a20=theta_v;
a21=(3*theta_g-3*theta0)/(4*t_f);
a22=(-12*theta_v+6*theta_g+6*theta0)/(4*t_f^2);
a23=(8*theta_v-5*theta_g-3*theta0)/(4*t_f^3);
syms theta(t)
theta=piecewise(0<=t<t1,a10+a11*t+a12*t^2+a13*t^3,t1<=t<=t1+t2,a20+a21*(t-t1)+a22*(t-t1)^2+a23*(t-t1)^3)
theta1=diff(theta)
theta2=diff(theta1)
theta3=diff(theta2)
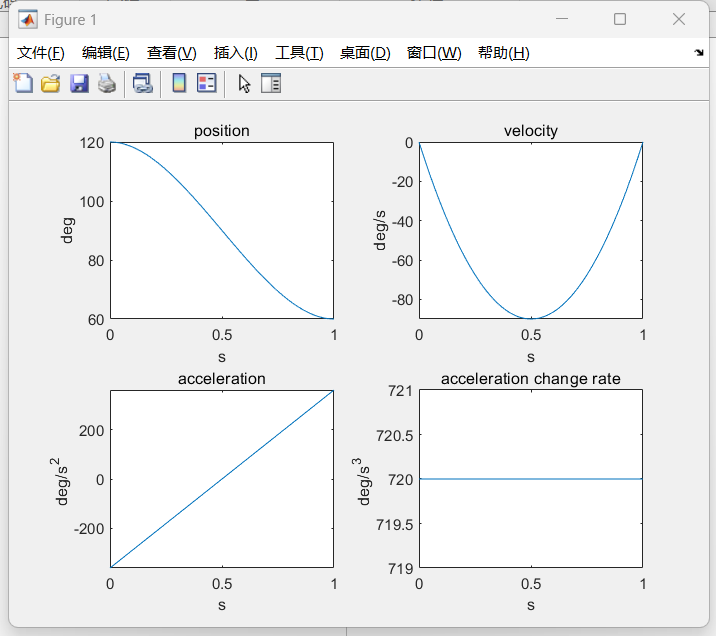
subplot(2,2,1)
fplot(theta,[0,2])
xlabel('s')
ylabel('deg')
title('position')
subplot(2,2,2)
fplot(theta1,[0,2])
xlabel('s')
ylabel('deg/s')
title('velocity')
subplot(2,2,3)
fplot(theta2,[0,2])
xlabel('s')
ylabel('deg/s^{2} ')
title('acceleration')
subplot(2,2,4)
fplot(theta3,[0,2])
xlabel('s')
ylabel('deg/s^{3} ')
title('acceleration change rate')
|