1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
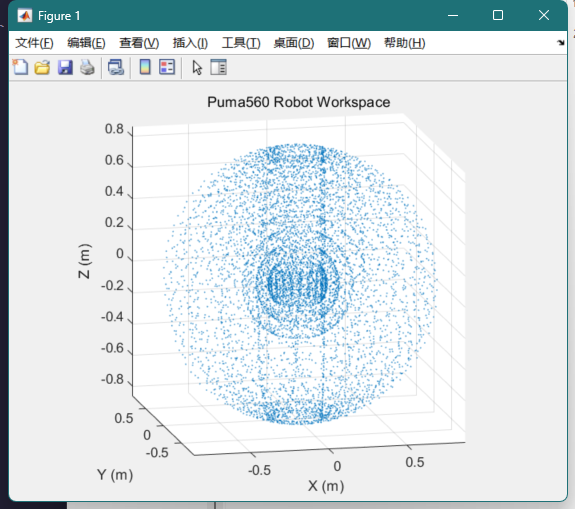
mdl_puma560
robot = p560;
q1 = deg2rad(linspace(-160, 160, 20));
q2 = deg2rad(linspace(-110, 110, 20));
q3 = deg2rad(linspace(-135, 135, 20));
q4 = deg2rad(linspace(-266, 266, 10));
q5 = deg2rad(linspace(-100, 100, 10));
q6 = deg2rad(linspace(-266, 266, 10));
workspace = [];
for i = 1:length(q1)
for j = 1:length(q2)
for k = 1:length(q3)
T = robot.fkine([q1(i), q2(j), q3(k), 0, 0, 0]);
position = transl(T);
workspace = [workspace; position];
end
end
end
figure;
plot3(workspace(:,1), workspace(:,2), workspace(:,3), '.', 'MarkerSize', 1);
xlabel('X (m)');
ylabel('Y (m)');
zlabel('Z (m)');
title('Puma560 Robot Workspace');
grid on;
axis equal;
|