multi agent replication
论文《Event-triggered Design for Optimal Output Consensus of High-order Multi-agent Systems》复现
1. 论文信息
- 论文标题: Event-triggered Design for Optimal Output Consensus of
High-order Multi-agent Systems
- 论文链接: Event-triggered
Design for Optimal Output Consensus of High-order Multi-agent
Systems
- 作者: Yutao Tang, Huaihui Liu, Ruonan Li, Kui Zhu
- Abstract: This paper studies the optimal output consensus problem for a group of heterogeneous linear multi-agent systems. Different from existing results, we aim at effective controllers for these high-order agents under both event-triggered control and event-triggered communication settings. We conduct an embedded design for the problem and constructively propose a multi-rate event-triggered controller with a set of applicable parameters. The proposed event-triggered rules are shown to be free of Zeno behaviors and can achieve the optimal output consensus goal for these high-order agents. A simulation example is given to verify the efficacy of our designs.
代码复现
依赖Eigen库进行矩阵计算, clion编译运行.
绘图使用matplotlib, 编译器为pycharm.
1. 代码结构
1 | |
核心部分就是UpdateController, UpdateSignalGenerator, UpdateDynamics三个函数. UpdateSignalGenerator实现upper lawer, 核心部分就是UpdateController实现lower lawer. 首先调用ShouldTrigger函数判断是否满足ETC条件, 如果满足, 则更新输入. UpdateDynamics三个函数实现agent的动力学更新.
状态的更新采用Runge-Kutta方法, 实现方法如下: 1
2
3
4
5
6
7
8auto rk4 = [&](const Eigen::VectorXd& x_in) -> Eigen::VectorXd {
return A_ * x_in + B_ * u_;
};
Eigen::VectorXd k1 = rk4(x_);
Eigen::VectorXd k2 = rk4(x_ + 0.5 * dt * k1);
Eigen::VectorXd k3 = rk4(x_ + 0.5 * dt * k2);
Eigen::VectorXd k4 = rk4(x_ + dt * k3);
x_ = x_ + (dt / 6) * (k1 + 2 * k2 + 2 * k3 + k4);
plot目录下为python绘图代码. 1
2
3plot/plot.py # 绘图代码
plot/z.png # 仿真结果
test.py # 测试代码, 可以忽略
2. 仿真结果
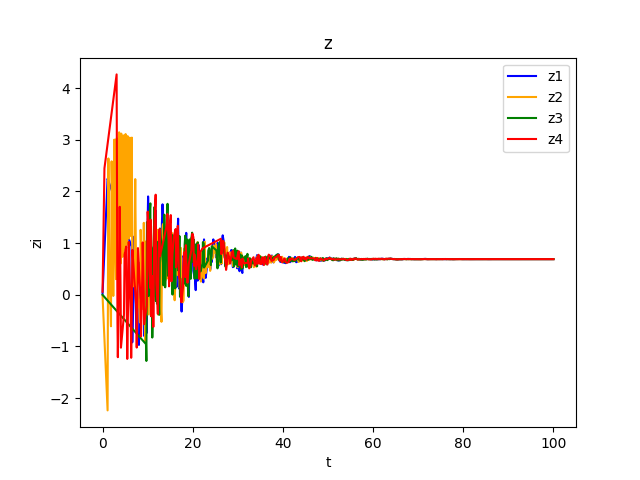
效果不好, 但是可以看出, 一致性是达到了的, 收敛到0.5附近.
3. 期间遇到的问题
3.1 Event-triggered-control(ETC)设计死锁
起初在实现ETC逻辑时, 采用的方法是先判断是否满足ETC条件, 再判断是否需要更新输入. 这种情况会导致agent的状态不更新, 造成死锁. 也就是说, ETC条件是永远不满足的, 因为依赖agent的状态更新. 而agent状态更新的前提是ETC条件满足. 解决方法是, 引入state_new变量, 先更新状态, 再判断event-trigger条件, 如果满足条件, 则更新状态. 这样就可以避免死锁问题.
代码中的实现如下: 1
2
3
4
5
6u_new_ = K1_ * x_ + K2_ * z_;
if(ShouldTriggerControl(t)) {
u_ = u_new_;
u_hat_ = u_;
last_control_time_ = t;
}
然而, 笔者在完成此逻辑后, 不由产生了一个疑问, ETC的设计是为了减少资源消耗, 但是如果每次都更新状态, 那么不就失去了ETC的意义吗? 后面找了找资料, 仔细想了想, 大概可以这样理解: ETC节省的是执行, 而不是观测和预测. 观测不可避免, 获取系统状态是必需的, 但是执行是可以避免的. ETC的设计主要是为了减少执行的频率, 减少通信/执行开销.
3.2 z的更新问题
在实现z更新的逻辑时, ShouldTriggerCommunication是写错了的,
所以跑出来的结果很奇怪. 当时是判断ETC条件满足后, 更新z.
实际上应该是更新z_dot才对, 也就是z的导数. 而z的更新是整个过程都要进行的.
z的更新也是采用了Runge-Kutta方法. 这个问题已经修复了. 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15auto [k1_z, k1_v] = rk4(z_, v_);
auto [k2_z, k2_v] = rk4(z_ + 0.5 * dt * k1_z, v_ + 0.5 * dt * k1_v);
auto [k3_z, k3_v] = rk4(z_ + 0.5 * dt * k2_z, v_ + 0.5 * dt * k2_v);
auto [k4_z, k4_v] = rk4(z_ + dt * k3_z, v_ + dt * k3_v);
z_dot_new_ = (1.0 / 6) * (k1_z + 2 * k2_z + 2 * k3_z + k4_z);
v_dot_new_ = (1.0 / 6) * (k1_v + 2 * k2_v + 2 * k3_v + k4_v);
if(ShouldTriggerCommunication(t)) {
z_dot_ = z_dot_new_;
v_dot_ = v_dot_new_;
z_hat_ = z_;
v_hat_ = v_;
last_comm_time_ = t;
}
z_ += z_dot_ * dt;
v_ += v_dot_ * dt;
3.3 参数疑问
最后得到的结果很不好, 可能是参数设置的问题, 更有可能是笔者对论文理解的不够深入, 所以部分逻辑实现错误.
Agent-3
仿真结果得到z是满足一致性要求的, 但是agent-3的状态输出y却没办法收敛到z3. 暂时没有找到原因.
理论分析
1. 理论基础
对于多智能体系统, 考虑高阶线性系统:$$ \[\begin{aligned} \dot{x}_i(t) &= A_ix_i(t) + B_iu_i(t), \\ y_i(t) &= C_ix_i(t), \\ \end{aligned}\]
$$ 每个智能体具有不同的动态特性(异构).
考虑最优一致性问题, 目标是设计控制器使得所有智能体的输出一致,
设计分布式控制器使得:
\[
\begin{aligned}
\lim_{t \to \infty} | y_i(t) - y_j(t) | \to 0,\\
\lim_{t \to \infty} y_i(t) = y^* \\
\end{aligned}
\] 上面第一个式子保证i-th智能体和其邻居j-th智能体的输出一致,
第二个式子保证所有智能体的输出一致. 其中\(y^*\)是所有智能体的输出一致性目标,
也是下列最优控制问题的解:
\[
\begin{aligned}
y^* = \arg \min_{s \in R} \sum_{i=1}^N f_i(s) \\
\end{aligned}
\] 其中函数\(f_i(s)\)是每个智能体的局部目标函数,
由每个智能体的状态输出决定.
总的来说, 论文的目标是设计一个分布式控制器, 使得所有智能体的输出一致, 并且最小化每个智能体的局部目标函数.
2. 信号生成器设计
我们期望每个agent i生成一个状态\(y_i\), 使得所有的\(y_i(t) \to y^*\), 其中:
\[
\begin{aligned}
y^* = \arg \min_{s \in R} \sum_{i=1}^N f_i(s) \\
\end{aligned}
\]
梯度下降
对优化问题:
\[
\min_{s \in R} \sum_{i=1}^N f_i(s)
\] 经典梯度下降为:
\[
s_{k+1} = s_k - \alpha \nabla f(s_k)
\] 可以写作:
\[
\dot{z} = -\alpha \sum_{i=1}^N \nabla f_i(z)
\] 分布式控制下, 每个agent i都可以得到局部目标函数\(f_i\), 于是设计如下的控制器:
\[
\dot{z}_i = -\alpha \nabla f_i(z_i) + \beta \sum_{j = 1}^{N} a_{ij} (z_i
- z_j)
\] 上式是论文中的写法, 引入了\(a_{ij}\), 也就是邻接矩阵, 使得每个agent
i只和其邻居进行通信. 当agent i和j相邻时, \(a_{ij} = 1\), 否则\(a_{ij} = 0\). 等价于:
\[
\dot{z}_i = -\alpha \nabla f_i(z_i) + \beta \sum_{j \in N_i} (z_i - z_j)
\] 其中\(N_i\)是agent
i的邻居集合.
上式可以看作是一个分布式的梯度下降算法, 其中第一项是agent i的局部目标函数的梯度, 驱动\(z_i\)向\(f_i\)的最小点收敛, 以满足局部最优目标, 第二项是agent i和其邻居之间的差异, 驱动\(z_i\)向邻居靠拢, 体现一致性的满足. 通过调整\(\alpha\)和\(\beta\)的值, 可以控制每个agent的收敛速度和一致性.
辅助变量
上述算法对于高阶系统或复杂网络不够稳定,
在事件触发控制环境下收敛精度不高或速度慢. 于是引入辅助变量\(v_i\)增加一个"动量项", 使得每个agent
i的控制器为:
\[
\begin{aligned}
\dot{z}_i &= -\alpha \nabla f_i(z_i) + \beta \sum_{j \in N_i} (z_i -
z_j) + \sum_{j \in N_i} (v_i - v_j), \\
\dot{v}_i &= \alpha \beta \sum_{j \in N_i} (z_i - z_j)\\
\end{aligned}
\] 可以理解为, \(v_i\)是一个积分项, 类似于PID控制中的积分项,
用于增加系统的稳定性:
\[
\dot{v}_i = \alpha \beta \sum_{j \in N_i} (z_i - z_j)
\] 得到 \[
v_i = \alpha \beta \int_0^t \sum_{j \in N_i} (z_i - z_j) dt
\] \(v_i -
v_j\)可以理解为历史中一致性误差反馈,
根据历史中邻居agent作用的大小来判断当前是要"缓一缓"还是要"加速",
从而更柔和和稳定, 快速达到一致性.
github仓库:multi_agent
博客:multi-agent-replication