robotics section 2 practice 1
robotics section 2 practice 1
a
题目
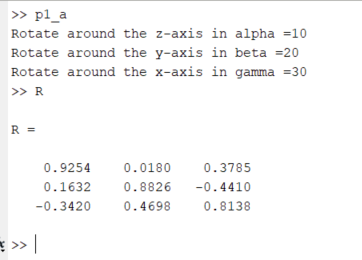
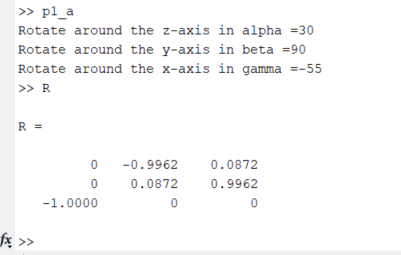
用Z-Y-X(\(\alpha\)-\(\beta\)-\(\gamma\))欧拉角表示法,写出MATLAB程序,当用户输入欧拉角\(\alpha\)-\(\beta\)-\(\gamma\)时,计算旋转矩阵\(^A_BR\)。
解答
1 | |
结果
b
题目
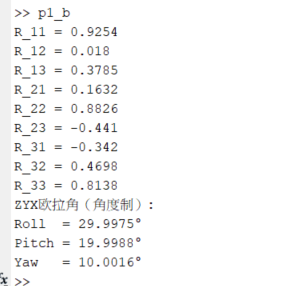
编写一个MATLAB程序。当输入旋转矩阵\(^A_BR\)时,计算出欧拉角\(\alpha\)-\(\beta\)-\(\gamma\)(反解问题)。计算两个可能的解。证明a)中两种情况的反解。使用循环方法检查你的结果是否正确(即将a)中的欧拉角输入到程序a;将得到的旋转矩阵\(^A_BR\)输入到程序b;你将得到两组解答:一组应当是用户原来的输入值,而另一组可用a)中的程序反复验证。
解答
1 | |
结果
c
题目
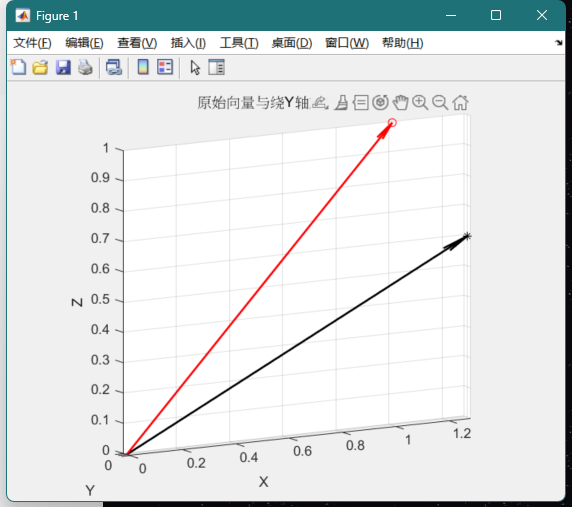
仅简单地绕Y轴旋转\(\beta\)角。已知\(\beta\)=20°和\(^BP=\{1, 0, 1\}^T\),计算\(^Ap\);用草图验证结果是否正确。
解答
1 | |
结果
robotics section 2 practice 1
https://symcreg.github.io/2025/04/09/robotics-section-2-practice-1/