CLF-CBF
1.动态控制仿射系统(Dynamics Control Affine System)
对于\(\dot{x} = F(t,x,u)\),其中系统状态\(x\in{\mathbb{R}^n}\),系统输入\(u \in{\mathbb{R}^m}\),如果\(F\)对于\(x\)和\(u\)是Lipschitz连续的,时间\(t\)是piecewise连续的,那么在给定的初始条件\(x_0\)下,轨迹\(x(t)\)是存在并且unique的。
一般写成如下形式:
\[\dot{x} = f(x) + g(x)u\]
其中\(f:\mathbb{R}^n\rightarrow{\mathbb{R}^n}, g:\mathbb{R}^n\rightarrow{\mathbb{R}^{n*m}}\),\(x\)是Lipschitz连续,\(x_e = 0\)。
2.CLF(Control Lyapunov Function)
Lyapunove Function数学定义如下:
\[V(x)\] \[s.t. V(x_e) = 0, V(x) > 0 \ for \ x \neq x_e\] \[\dot{V(x)} = \frac{\partial V}{\partial x}f(x) < 0 \ for \ x \neq x_e\]
\(V(x)\)是定义的Lyapunov函数,下面的是约束条件,当满足上述两个约束时,我们可以认为x渐近稳定。
将输入\(u\)引入到Lyapunove Function,得到新的方程。 使\(V(x):\mathbb{R}^n\rightarrow{\mathbb{R}}\)是连续Differential函数,如果存在一个常数\(c>0\)使得\(V(x)\)满足如下条件,那么\(V(x)\)就是一个关于\(x\)的Control Lyapunov Function。
\(1)\ \Omega := \{x \in{\mathbb{R}^n}:V(x)\le{c}\}\),\(V(x)\)是有界的
\(2)\ V(x)>0\),对于所有的\(s\in{R^n}\backslash \{x_e\}\),\(V(e_e)=0\)
\(3)\ inf_{u\in{U}}\dot{V}(x,u)<0\),对于所有的\(x\in{\Omega_c}\backslash\{x_e\}\)
为了简化\(\dot{V}(x,u)\)的表达,用Lie括号描述:
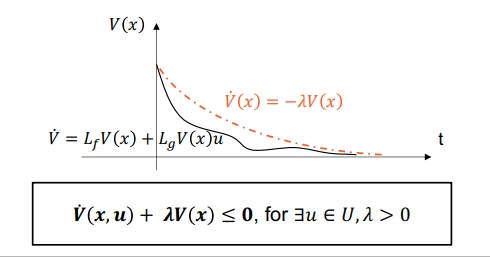
\[\dot{V}(x,u) = \nabla{V}(x) * \dot{x} = \nabla{V}(x) * f(x) + \nabla{V}(x) * g(x)*u = L_fV(x) + L_gV(x)u\] \[(L_pq(x):=\nabla{q(x)}*p(x))\]
CLF保证系统最终会稳定,但不能确定多快才能稳定,这时候引入指数稳定CLF(ESCLF)。
如果存在常数\(\lambda > 0\)使得\(inf_{u \in{U}}\dot{V}(x,u)+{\lambda}{V(x)}\le0\) ,那么\(V(x)\)就是ESCLF。
3.CLF-QP
将CLF转化为QP问题,搜索满足CLF-QP问题的输入u。
\[argmin \ (u-u_ref)^{T}{H(u-u_ref)}+p\delta^2\] \[subject\ to :\ L_fV(x)+L_gV(x)u+\lambda{V(x)}\le{\delta}\]
其中\(\delta\)是松弛变量,\(p\)是惩罚因子,设置松弛变量的目的是在实际搜索中,较难找到一个合适的解,增加松弛变量后会放松CLF条件,在允许的情况下不满足CLF约束,但获得一个解。
另外,这里的H是Hassian矩阵,表示二次项系数,将\((u-u_ref)^{T}{H(u-u_ref)}\)理解为二次的cost函数(或者能量函数?),是人为构建的,二次保证解的u的输入使系统收敛较快。
4.CBF
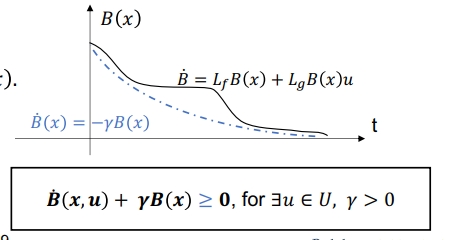
CLF约束确保系统渐趋稳定,而CBF的作用是确保系统安全,使系统处于规定的安全集合约束内。
//TODO:补充CBF原理当\(B(x):\mathbb{R}^n \rightarrow \mathbb{R}\)是连续可微的,零超水平集(zero-superlevel)为\(C\),\(C=\{x|B(x)\ge0\}\),对于所有\(x\in{\partial{C}}\),\(\nabla{B(x)\ne0}\),如果存在一个扩展\(Class \ K_\infty\)函数\(\alpha\)(工程中一般使用正常数和\(B(x)\)的线性组合获取,如:\(\gamma{B(x)},\gamma>0\)),存在一个集合\(D\subset{\mathbb{R}^n}\),使得\(C\subset{D}\)满足:
\[sup_{u\in{U}}[L_f{B(x)}+L_g{B(x)}u]+\alpha({B(x)})\ge0\]
那么对于所有\(x\in{D}\),\(B(x)\)是一个CBF。
5.CLF-CBF-QP
将CLF和CBF都转化为QP问题的约束条件,其中CLF保证控制器稳定,CBF保证控制满足安全条件。
\[argmin \ (u-u_ref)^{T}{H(u-u_ref)}+p\delta^2\] \[subject\ to :\] \[\ L_fV(x)+L_gV(x)u+\lambda{V(x)}\le{\delta}\] \[L_f{B(x)}+L_g{B(x)}u]+\gamma{B(x)}\ge0\]